Wenn Sie sich darauf vorbereiten, Ihr nächstes Projekt mit präziser Bewegungssteuerung auszustatten, Zu wissen, wie man Servomotoren und Joysticks auswählt und verwendet, kann den entscheidenden Unterschied machen. Ob Sie einen Roboterarm bauen, Herstellung eines interaktiven Geräts, oder die Feinabstimmung eines Automatisierungsprototyps, Die Auswahl der richtigen Komponenten und deren reibungslose Integration ist der Schlüssel zur Vermeidung von Problemen wie Motorabwürgen oder fehlerhafter Steuerung. In diesem Ratgeber, Sie werden es direkt verstehen, Expertenempfehlungen zur Auswahl der perfekten Servomotoren und Joysticks, plus praktische Tipps zur Verkabelung, Kalibrierung, und Optimierung der Leistung – alles, was Sie brauchen, um Ihr System sicher und präzise in Betrieb zu nehmen. Lassen Sie uns direkt auf das Wesentliche eingehen, um Ihren Heimwerker- oder Ingenieursauftrag zu verbessern!
Servomotoren verstehen: Grundlagen und Typen
Bei der Auswahl eines Servomotors, Es ist wichtig, die Grundlagen zu verstehen, um fundierte Entscheidungen treffen zu können. Im Kern, Servomotoren sind Dreh- oder Linearantriebe, die mit Rückkopplungsmechanismen – normalerweise Encodern oder Potentiometern – ausgestattet sind, die die Position kontinuierlich überwachen, Geschwindigkeit, und Drehmoment. Dieses Feedback ermöglicht eine präzise Steuerung, unverzichtbar für die Robotik, Automatisierung, und Hobbyprojekte gleichermaßen.
Rotary vs. Lineare Servomotoren
- Am gebräuchlichsten sind Drehservos, Drehen von Wellen in bestimmten Winkeln. Denken Sie an Roboterarme, Schwenk-Neige-Kamerahalterungen, oder RC-Modelle.
- Linearservos bewegen Objekte entlang einer geraden Bahn. Sie sind ideal für Schiebetüren, Ventilsteuerungen, oder präzise lineare Positionierung.
Wenn Sie Ihre Anwendung verstehen, können Sie feststellen, ob eine Dreh- oder Linearbewegung am besten geeignet ist.
Wechselstrom vs. DC-Bedienstete: Drehmoment und Effizienz
- AC-Servomotoren bieten normalerweise ein höheres Drehmoment bei höheren Geschwindigkeiten und eine bessere thermische Leistung, Damit sind sie ideal für die industrielle Automatisierung.
- DC-Servos, Wird häufig in Hobby- und Leichtbauanwendungen eingesetzt, bieten eine einfache Steuerung und ein hohes Drehmoment-Größen-Verhältnis, können jedoch bei anspruchsvollen Aufgaben weniger effizient sein.
Bei jedem Typ gibt es Kompromisse zwischen der Geschwindigkeit, Drehmoment, Effizienz, und Komplexität.
Hobby-Grade vs. Servos in Industriequalität
- Hobby-Servos sind erschwinglich und kompakt, verfügen jedoch möglicherweise nicht über die nötige Haltbarkeit für eine dauerhafte, starke Beanspruchung.
- Servos in Industriequalität, wie zum Beispiel die in der Domi-Servo-Reihe, bieten erhöhte Zuverlässigkeit, erweiterte Feedback-Optionen, und robuste Konstruktion, geeignet für anspruchsvolle Umgebungen.
Egal, ob Sie ein DIY-Robotikprojekt realisieren oder ein professionelles Automatisierungssystem ausrüsten, Das Sortiment von domi reicht vom Einsteiger- bis zum Premium-Industrieservo, Bereitstellung einer ausgewogenen Wahl zwischen Kosten, Leistung, und Langlebigkeit.
Wichtige Empfehlungen zur Auswahl des richtigen Servomotors
Die Auswahl des richtigen Servomotors beginnt mit einem klaren Start, Schritt-für-Schritt-Prozess, der den spezifischen Anforderungen Ihrer Anwendung entspricht. Erste, Bewerten Sie die Hauptanforderungen wie das Ladungsgewicht, erforderliche Beschleunigung, und die Umgebung – ob drinnen, staubig, oder feucht. Diese Faktoren beeinflussen die Wahl Ihres Motors maßgeblich.
Nächste, Drehmoment- und Drehzahlberechnungen durchführen, Berücksichtigung des Trägheitsverhältnisses, um einen reibungslosen Betrieb zu gewährleisten, reaktionsfähige Bewegung. Wenn das Trägheitsverhältnis innerhalb der empfohlenen Grenzen gehalten wird, wird ein Überschwingen reduziert und die Steuerung verbessert. Berücksichtigen Sie sorgfältig die Motorgröße und die Montagemöglichkeiten, da sich die ordnungsgemäße Installation sowohl auf die Leistung als auch auf die Langlebigkeit auswirkt. Übersehen Sie nicht die Getriebeoptionen, Dadurch kann die Drehmomentabgabe ohne Einbußen bei der Geschwindigkeit optimiert werden.
Feedback-Geräte wie Encoder, Resolver, oder Potentiometer spielen eine entscheidende Rolle für Genauigkeit und Regelstabilität. Die Wahl des richtigen Feedbacktyps hängt von Ihren Präzisionsanforderungen und der Systemkomplexität ab.
Vermeiden Sie häufige Fallstricke wie eine Unterdimensionierung des Servos oder eine falsche Auslegung der Spezifikationen; Tools wie der Größenrechner von domi können dabei helfen, dies zu vereinfachen. Es ist wichtig, Ihr Budget gegen die Leistung abzuwägen – das Angebot von domi reicht von Einsteigermodellen bis hin zu Premium-Servomotoren, So können Sie eine Lösung auswählen, die sowohl zu Ihrem Projekt als auch zu Ihrem Finanzplan passt.
Für detaillierte technische Beratung und die Auswahl der besten Lösung, Entdecken Sie Domis engagierte technische Ressourcen Und Produktpalette um maßgeschneiderte Servomotorlösungen zu finden.
Joysticks entmystifizieren: Typen, Spezifikationen, und Auswahlkriterien
Die Wahl des richtigen Joysticks beginnt mit dem Verständnis der wichtigsten Typen: analog und digital. Analoge Joysticks sorgen für reibungslose Bedienung, Dauersignale, Ideal für eine präzise Steuerung, während digitale Joysticks einfache Ein-/Aus-Anweisungen bieten, besser geeignet für einfache Befehle. Dieser Wahrnehmungsunterschied wirkt sich auf die Präzision aus, Wählen Sie also je nachdem, wie genau Sie Ihre Servosysteme steuern müssen.
Auch die Ergonomie spielt eine Rolle. Thumbsticks sind kompakt und praktisch für den gelegentlichen Gebrauch oder Handheld-Geräte, Vollhand-Joysticks hingegen bieten besseren Halt und Komfort bei längerem Betrieb, häufig in Industrie- oder Robotikanlagen.
Eine weitere wichtige Entscheidung ist die kabelgebundene versus kabellose Lösung. Kabelgebundene Joysticks haben normalerweise eine geringere Latenz und machen sich keine Sorgen um die Batterie, Dies macht sie zuverlässig für zeitkritische Anwendungen. Drahtlose Optionen bieten mehr Freiheit, können jedoch zu leichten Verzögerungen führen und erfordern eine Energieverwaltung – entscheidend, wenn Sie Wert auf unterbrechungsfreie Kontrolle oder Portabilität legen.
Bei der Auswahl eines Joysticks, Konzentrieren Sie sich auf die Auflösung (Höhere Zählungen bedeuten eine feinere Bewegungserkennung), Force-Feedback (für ein taktileres Erlebnis), und Haltbarkeit, vor allem, wenn das Gerät stark beansprucht wird. Kompatibilität mit Mikrocontrollern wie Arduino ist ein Muss für Bastler und Entwickler; Zum Glück, Viele Domi-Joystick-Module sind mit reibungsloser Schnittstelle und Anti-Drift-Technologie ausgestattet, Dies hilft dabei, im Laufe der Zeit genaue Neutralpositionen beizubehalten, verhindert fehlerhafte Servobefehle.
Für detaillierte Optionen, Entdecken Sie die Joystick-Module von Domi, die Präzision und Robustheit in Einklang bringen, Perfekt für die Integration in Ihre Motion-Control-Projekte.
Verknüpfung von Joysticks mit Servosystemen
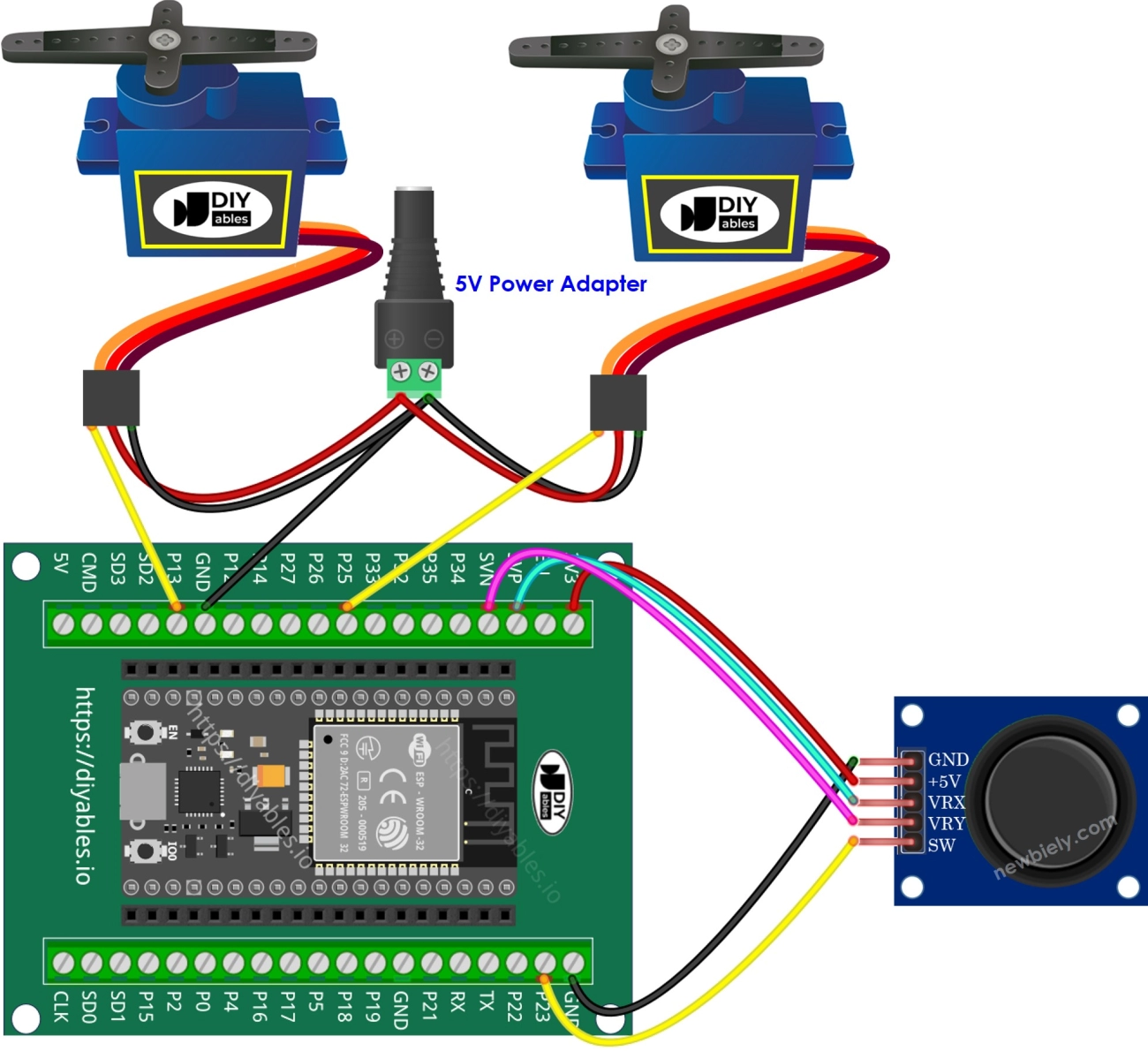
Der Anschluss von Joysticks an Servomotoren erfordert ein gutes Verständnis der Hardware-Grundlagen. Beginnen Sie damit, die Pinbelegung Ihres Joysticks und Servos zu verstehen und das richtige Signal zu finden, Leistung, und Erdungsstifte ist wichtig, um Schäden zu vermeiden. Überprüfen Sie immer die Spannungskompatibilität; Die meisten Hobby-Servos und Joysticks werden mit 5 V betrieben, Aber überprüfen Sie die Spezifikationen noch einmal, um Abweichungen zu vermeiden.
Bei der Verkabelung, Halten Sie die Kabel kurz und ordentlich, um Geräusche zu reduzieren. Für Einzelservo-Setups, eine einfache Dreileiterverbindung (Signal, Leistung, Boden) genügt, Dual-Servo- oder Schwenk-Neige-Systeme hingegen erfordern eine Verkabelung für jedes Servo sowie gemeinsame Strom- und Erdungsleitungen. Klare Schaltpläne können helfen, korrekte Verbindungen sicherzustellen und die Fehlerbehebung zu erleichtern.
Was die Bewegungssteuerung angeht, Servomotoren werden typischerweise durch PWM angetrieben (Pulsweitenmodulation) Signale, wobei die Impulsbreite den Winkel der Servowelle bestimmt. Joysticks geben normalerweise eine analoge Spannung proportional zu ihrer Position aus; Dies muss korrekt dem PWM-Bereich des Servos zugeordnet werden. Die Arduino IDE macht dies unkompliziert, mit zahlreichen Bibliotheken und Beispielcode verfügbar.
Zu den wichtigsten Code-Praktiken gehören::
- Deadzone-Kalibrierung: Filtert kleinere Joystick-Jitter in der Mitte heraus, um das Flackern des Servos zu stoppen.
- Jitter-Glättung: Mittelung der Eingangswerte oder Anwendung von Tiefpassfiltern zur Erzeugung einer Glättung, stabile Bewegung.
Für eine erweiterte Kontrolle, Mehrachsen-Setups profitieren von Treibern wie den Domi-Servotreibern, die mehrere Servos mit präziser Synchronisierung und gleichmäßigen Bewegungsprofilen verwalten, Ideal für Roboterarme oder Kamerakardanringe.
Für praktische Beispiele und digitale Ausgangsmodule zur Ergänzung Ihrer Servosteuerung, Erwägen Sie die Integration von Lösungen wie dem Siemens Simatic S7-1200 digitales Ausgangsmodul, das robuste Hardware-Schnittstellenoptionen für Projekte in Industriequalität bietet.
Praktische Nutzung und Best Practices
Beginnen Sie mit einem Anfängerprojekt, Ideal ist ein einfacher Aufbau, bei dem ein einzelner Joystick einen Servomotor steuert. Dazu gehört die Verkabelung des Joysticks mit einem Arduino, Verbinden Sie das Servosignalkabel mit einem PWM-Pin, und das Schreiben von einfachem Code, um Joystick-Bewegungen der Position des Servos zuzuordnen. Ein klarer Schaltplan trägt dazu bei, einen reibungslosen Ersttest zu gewährleisten, Besonders für diejenigen, die mit der Joystick-Servo-Schnittstelle noch nicht vertraut sind.
Für ein Zwischenprojekt, Probieren Sie eine Schwenk-Neige-Kamerahalterung mit Doppelservo aus, die über einen Joystick gesteuert wird. Dieser Aufbau ermöglicht die unabhängige Steuerung horizontaler und vertikaler Bewegungen, Verbesserung der Benutzerfreundlichkeit in Anwendungen wie Fernüberwachung oder Fotografie. Die Verkabelung ist etwas komplexer, erfordert eine sorgfältige Spannungsanpassung und Pinbelegung. In dieser Phase werden die Fähigkeiten in der Kalibrierung der Bewegungssteuerung geschärft und in die grundlegende Mehrachsenkoordination eingeführt.
Im professionellen Einsatz, Konzentrieren Sie sich auf die Feinabstimmung der Kalibrierung für eine präzise Reaktion, Effektives Energiemanagement zur Vermeidung von Spannungsabfällen, und gründliche Tests, um die Zuverlässigkeit unter verschiedenen Betriebsbedingungen sicherzustellen. Tools wie das PID-Tuning, das an das Trägheitsverhältnis Ihres Servos angepasst wird, können die Leistung erheblich steigern. Durchgängige Wartungsprotokolle und Not-Aus-Mechanismen erhöhen zudem die Sicherheit und Langlebigkeit.
Ein tolles Beispiel für den praktischen Erfolg sind die Servo-Kits von domi, die in RC-Drohnensteuerungen eingesetzt werden, bekannt für ihre hohe Ansprechgenauigkeit und Haltbarkeit. Diese Kits zeigen, was durch die Kombination hochwertiger Servos in Industriequalität mit robusten Joystickmodulen und Anti-Drift-Technologie möglich ist, Damit eignen sie sich perfekt für anspruchsvolle britische Benutzer, die bei Hobby- und professionellen Anwendungen an die Grenzen gehen.
Detaillierte Motorsteuerungskomponenten zur Unterstützung erweiterter Setups, Erwägen Sie die Erkundung von Optionen wie dem Fanuc CNC-Steuerungssystemplatine die eine anspruchsvolle Schnittstelle und Zuverlässigkeit bieten können.
Fehlerbehebung und Optimierung
Beim Arbeiten mit Servomotoren und Joysticks, Es können einige häufige Probleme auftreten, die sich auf Leistung und Zuverlässigkeit auswirken:
- Nervosität: Dies ist häufig auf Signalrauschen oder eine falsche Pulsweitenmodulation zurückzuführen (PWM) Einstellungen. Überprüfen Sie Ihre Verkabelung auf lose Verbindungen und stellen Sie eine saubere Filterung der Stromversorgung sicher. Durch die Verwendung abgeschirmter Kabel können Störungen reduziert werden.
- Abisolieren von Getrieben: Eine Überlastung des Servos über seine Drehmomentgrenzen hinaus kann zur Beschädigung des Getriebes führen. Vermeiden Sie dies, indem Sie Ihren Servo mithilfe von Berechnungen des Trägheitsverhältnisses richtig dimensionieren und sich bei Bedarf für Modelle mit hohem Drehmoment entscheiden.
- Signalrauschen: Elektrisches Rauschen kann das Encoder-Feedback oder die Joystick-Eingänge verzerren, unregelmäßige Bewegungen verursachen. Eine ordnungsgemäße Erdung und das Hinzufügen von Ferritperlen können zur Reinigung von Signalleitungen beitragen.
Um die Leistung zu optimieren, Konzentrieren Sie sich auf die PID-Abstimmung – die proportionale Anpassung, Integral, und Ableitungsgewinne, um Bewegungen zu glätten und Überschwinger zu reduzieren. Die Anpassung der Trägheit des Servos an die Last der Anwendung ist entscheidend für eine präzise Steuerung und die Vermeidung mechanischer Belastungen.
Regelmäßige Wartung ist der Schlüssel zur Langlebigkeit:
- Schmieren Sie Zahnräder und bewegliche Teile gemäß den Empfehlungen des Herstellers.
- Halten Sie die Firmware auf dem neuesten Stand, um von verbesserten Steuerungsalgorithmen zu profitieren.
- Erwägen Sie Komponenten-Upgrades, wenn die Betriebsbedingungen die ursprünglichen Spezifikationen überschreiten.
Endlich, Geben Sie der Sicherheit immer Vorrang. Integrieren Sie einen Überstromschutz, um Schäden bei Blockierbedingungen zu verhindern, und planen Sie Notstopps in Ihre Steuerlogik ein, um Gefahren zu mindern.
Weitere Informationen zur Integration von Sicherheitsvorrichtungen in Ihr Servosystem, Sehen Sie sich das Sortiment an berührungslose Sicherheitssensoren zur Erhöhung der Betriebssicherheit konzipiert.