Si se está preparando para incorporar un control de movimiento preciso a su próximo proyecto, Saber elegir y utilizar servomotores y joysticks puede marcar la diferencia.. Ya sea que estés construyendo un brazo robótico, elaborando un dispositivo interactivo, o perfeccionar un prototipo de automatización, Elegir los componentes correctos e integrarlos sin problemas es clave para evitar dolores de cabeza como paradas del motor o control errático.. En esta guía, serás sencillo, Recomendaciones de expertos para seleccionar los servomotores y joysticks perfectos., además de consejos prácticos para el cableado, calibración, y optimizar el rendimiento: todo lo que necesita para que su sistema funcione con confianza y precisión. Vayamos directamente a lo esencial para mejorar su proyecto de ingeniería o construcción de bricolaje.!
Entendiendo los servomotores: Fundamentos y tipos
Al elegir un servomotor, Es crucial comprender los conceptos básicos para tomar decisiones informadas.. En su núcleo, Los servomotores son actuadores rotativos o lineales equipados con mecanismos de retroalimentación (generalmente codificadores o potenciómetros) que monitorean continuamente la posición., velocidad, y par. Esta retroalimentación permite un control preciso, esencial para la robótica, automatización, y proyectos de hobby por igual.
rotativo vs.. Servomotores lineales
- Los servos rotativos son los más comunes., ejes giratorios a ángulos específicos. Piense en brazos robóticos, soportes de cámara con giro e inclinación, o modelos RC.
- Los servos lineales mueven objetos a lo largo de un camino recto.. Son ideales para puertas correderas., controles de válvula, o posicionamiento lineal preciso.
Comprender su aplicación ayuda a determinar si el movimiento giratorio o lineal es el más adecuado.
aire acondicionado frente a. Sirvientes de DC: Torque y eficiencia
- Los servomotores de CA suelen proporcionar un mayor par a velocidades más rápidas y un mejor rendimiento térmico., haciéndolos ideales para la automatización industrial.
- servos CC, Se encuentra comúnmente en aplicaciones ligeras y de hobby., Ofrecen facilidad de control y altas relaciones entre par y tamaño, pero pueden ser menos eficientes en tareas pesadas..
Cada tipo tiene compensaciones entre velocidad, esfuerzo de torsión, eficiencia, y complejidad.
Grado Hobby vs.. Servos de grado industrial
- Los servos para aficionados son asequibles y compactos, pero pueden carecer de la durabilidad necesaria para un uso intensivo y sostenido..
- Servos de grado industrial, como los de la línea de servos domi, ofrecer mayor confiabilidad, opciones avanzadas de comentarios, y construcción robusta adecuada para entornos exigentes.
Ya sea que esté elaborando un proyecto de robótica de bricolaje o equipando un sistema de automatización profesional, La gama de domi cubre desde servos industriales básicos hasta servos industriales premium., ofreciendo una elección equilibrada entre coste, actuación, y longevidad.
Recomendaciones clave para elegir el servomotor adecuado
La selección del servomotor correcto comienza con una clara, Proceso paso a paso que se adapta a las necesidades específicas de su aplicación.. Primero, Evaluar las demandas principales como el peso de la carga., aceleración requerida, y el medio ambiente, ya sea en interiores, polvoriento, o húmedo. Estos factores influyen drásticamente en su elección de motor.
Próximo, realizar cálculos de par y velocidad, teniendo en cuenta la relación de inercia para garantizar una suave, movimiento de respuesta. Mantener la relación de inercia dentro de los límites recomendados reduce el exceso y mejora el control.. Considere cuidadosamente el tamaño del motor y las opciones de montaje., ya que una instalación adecuada afecta tanto al rendimiento como a la longevidad. No pase por alto las opciones de reductores, que puede optimizar la salida de par sin sacrificar la velocidad.
Dispositivos de retroalimentación como codificadores., resolutores, o potenciómetros juegan un papel crítico en la precisión y la estabilidad del control.. La elección del tipo de retroalimentación correcto depende de los requisitos de precisión y la complejidad del sistema..
Evite errores comunes como reducir el tamaño del servo o leer mal las especificaciones.; Herramientas como la calculadora de tallas de Domi pueden ayudar a simplificar esto.. Equilibrar su presupuesto con el rendimiento es esencial: la línea de domi abarca desde opciones de nivel básico hasta servomotores premium, permitiéndole elegir una solución que se ajuste tanto a su proyecto como a su plan financiero.
Para obtener asesoramiento técnico detallado y elegir la mejor combinación, explora el dedicado de domi recursos tecnicos y gama de productos para encontrar soluciones de servomotores a medida.
Desmitificando los joysticks: Tipos, Especificaciones, y criterios de selección
La elección del joystick adecuado comienza con la comprensión de los tipos principales: analógico y digital. Los joysticks analógicos proporcionan, señales continuas, ideal para un control preciso, mientras que los joysticks digitales ofrecen instrucciones simples de encendido/apagado, más adecuado para comandos sencillos. Esta diferencia de detección afecta la precisión., Así que elija en función de la precisión con la que necesite controlar sus servosistemas..
La ergonomía también importa. Los joysticks son compactos y prácticos para uso ocasional o dispositivos portátiles., mientras que los joysticks de mano completa ofrecen mejor agarre y comodidad para un funcionamiento prolongado, Común en configuraciones industriales o robóticas..
Cableado versus inalámbrico es otra decisión clave. Los joysticks con cable suelen tener una latencia más baja y no tienen problemas con la batería, haciéndolos confiables para aplicaciones en las que el tiempo es crítico. Las opciones inalámbricas añaden libertad, pero pueden introducir ligeros retrasos y requerir administración de energía, algo crucial si valora el control ininterrumpido o la portabilidad..
Al seleccionar un joystick, centrarse en la resolución (recuentos más altos significan una detección de movimiento más fina), forzar retroalimentación (para una experiencia más táctil), y durabilidad, especialmente si el dispositivo tendrá un uso intensivo. La compatibilidad con microcontroladores como Arduino es imprescindible para aficionados y desarrolladores.; agradecidamente, Muchos módulos de joystick domi vienen listos con una interfaz suave y tecnología anti-deriva, lo que ayuda a mantener posiciones neutrales precisas a lo largo del tiempo, evitando comandos de servo erráticos.
Para opciones detalladas, Explore los módulos de joystick de domi que equilibran precisión y robustez, perfecto para integrar en sus proyectos de control de movimiento.
Interfaz de joysticks con servosistemas
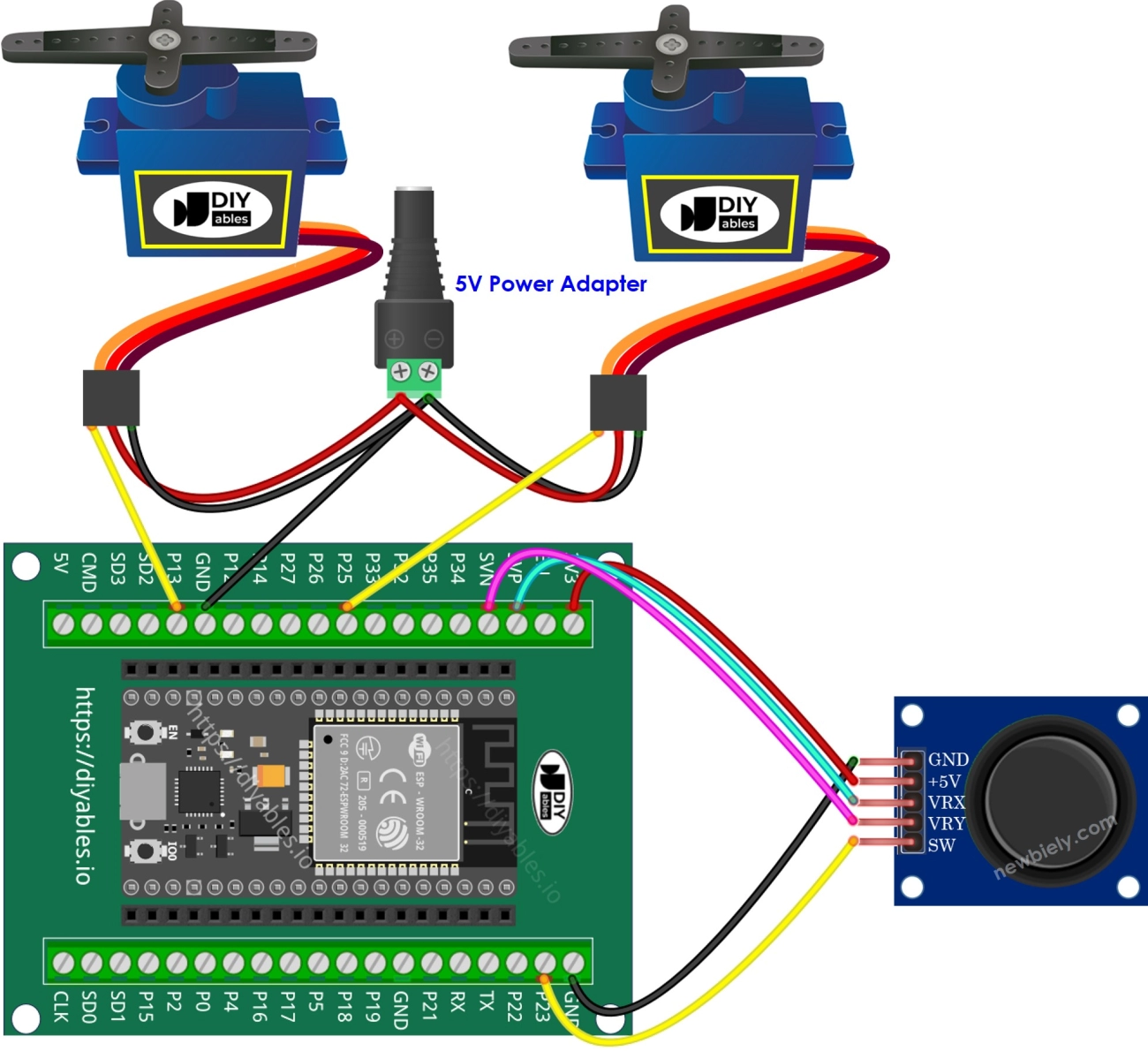
Conectar joysticks a servomotores requiere un buen conocimiento de los elementos esenciales del hardware. Comience por comprender la distribución de pines de su joystick y servo: hacer coincidir la señal correcta, fuerza, y pines de tierra es vital para evitar daños. Siempre verifique la compatibilidad de voltaje; la mayoría de los servos y joysticks de hobby funcionan con 5V, pero verifique las especificaciones para evitar discrepancias.
Al cablear, Mantenga los cables cortos y ordenados para reducir el ruido.. Para configuraciones de servo único, una simple conexión de tres hilos (señal, fuerza, suelo) basta, mientras que los sistemas de servo dual o giro-inclinación requieren cableado para cada servo más líneas comunes de alimentación y tierra.. Los diagramas de cableado claros pueden ayudar a garantizar conexiones correctas y facilitar la resolución de problemas..
En términos de control de movimiento., Los servomotores suelen ser accionados por PWM. (Modulación de ancho de pulso) señales, donde el ancho del pulso determina el ángulo del eje del servo. Los joysticks suelen generar un voltaje analógico proporcional a su posición.; esto debe asignarse correctamente al rango PWM del servo. El IDE de Arduino hace que esto sea sencillo, con muchas bibliotecas y código de ejemplo disponibles.
Las prácticas de código clave incluyen:
- Calibración de zona muerta: Filtrar pequeñas vibraciones del joystick alrededor del centro para detener el parpadeo del servo..
- Suavizado de fluctuación: promediar los valores de entrada o aplicar filtros de paso bajo para crear, movimiento estable.
Para un control más avanzado, Las configuraciones multieje se benefician de controladores como los servocontroladores domi., que manejan múltiples servos con sincronización precisa y perfiles de movimiento suaves, ideal para brazos robóticos o cardanes de cámara.
Para ejemplos prácticos y módulos de salidas digitales para complementar su servocontrol, considere integrar soluciones como la Módulo de salidas digitales Siemens Simatic S7-1200, que ofrece sólidas opciones de interfaz de hardware para proyectos de nivel industrial.
Uso práctico y mejores prácticas
Comenzando con un proyecto para principiantes, lo ideal es una configuración sencilla en la que un solo joystick controla un servomotor. Esto implica conectar el joystick a un Arduino., conectar el cable de señal del servo a un pin PWM, y escribir código sencillo para asignar los movimientos del joystick a la posición del servo. Un esquema claro ayuda a garantizar pruebas iniciales sin problemas, especialmente para aquellos nuevos en la interfaz servo joystick.
Para un proyecto intermedio, Pruebe un soporte de cámara con giro e inclinación de doble servo controlado por un joystick. Esta configuración permite el control independiente de los movimientos horizontales y verticales., mejorar la usabilidad en aplicaciones como vigilancia remota o fotografía. El cableado es un poco más complejo., Requiriendo una cuidadosa coincidencia de voltaje y asignaciones de pines.. Esta etapa mejora las habilidades en la calibración del control de movimiento e introduce la coordinación básica de múltiples ejes..
En implementaciones profesionales, centrarse en el ajuste fino de la calibración para una respuesta precisa, Administrar la energía de manera efectiva para evitar caídas de voltaje., y pruebas exhaustivas para garantizar la confiabilidad en diferentes condiciones de operación. Herramientas como el ajuste PID ajustado a la relación de inercia de su servo pueden aumentar significativamente el rendimiento. Los protocolos de mantenimiento consistentes y los mecanismos de parada de emergencia también mejoran la seguridad y la longevidad..
Un gran ejemplo de éxito práctico son los kits de servo de domi utilizados en los controladores de drones RC., conocidos por su alta precisión de respuesta y durabilidad. Estos kits demuestran lo que se puede lograr combinando servos de calidad de grado industrial con módulos de joystick robustos y tecnología anti-deriva., haciéndolos perfectos para usuarios exigentes del Reino Unido que superan los límites de las aplicaciones profesionales y de hobby..
Para componentes de control de motor detallados para admitir configuraciones avanzadas, Considere explorar opciones como la Placa de circuito del sistema de control CNC Fanuc que puede proporcionar interfaz sofisticada y confiabilidad.
Solución de problemas y optimización
Cuando se trabaja con servomotores y joysticks, Pueden surgir algunos problemas comunes que afectan el rendimiento y la confiabilidad.:
- Estar nervioso: Esto a menudo se debe a ruido de señal o a una modulación de ancho de pulso incorrecta. (PWM) ajustes. Revise el cableado en busca de conexiones sueltas y asegúrese de que el filtrado de la fuente de alimentación esté limpio.. El uso de cables blindados puede reducir las interferencias..
- Desmontaje de engranajes: Sobrecargar el servo más allá de sus límites de torque puede dañar los engranajes. Evite esto dimensionando correctamente su servo utilizando cálculos de relación de inercia y optando por modelos de alto torque cuando sea necesario..
- Ruido de señal: El ruido eléctrico puede distorsionar la retroalimentación del codificador o las entradas del joystick., provocando movimientos erráticos. Una conexión a tierra adecuada y la adición de perlas de ferrita pueden ayudar a limpiar las líneas de señal.
Para optimizar el rendimiento, centrarse en el ajuste PID: ajuste proporcional, integral, y ganancias derivadas para suavizar los movimientos y reducir el exceso. Hacer coincidir la inercia del servo con la carga de la aplicación es fundamental para un control preciso y evitar tensiones mecánicas..
El mantenimiento regular es clave para la longevidad:
- Lubrique los engranajes y las piezas móviles según lo recomendado por el fabricante..
- Mantenga el firmware actualizado para beneficiarse de algoritmos de control mejorados.
- Considere actualizaciones de componentes cuando las condiciones operativas superen las especificaciones originales..
Finalmente, siempre priorice la seguridad. Integre protección contra sobrecorriente para evitar daños durante condiciones de pérdida y planifique paradas de emergencia en su lógica de control para mitigar los peligros..
Para obtener más información sobre la integración de dispositivos de seguridad como parte de su servosistema, ver la gama de sensores de seguridad sin contacto diseñado para mejorar la seguridad operativa.