Si vous vous préparez à apporter un contrôle de mouvement précis à votre prochain projet, savoir choisir et utiliser les servomoteurs et les joysticks peut faire toute la différence. Que vous construisiez un bras robotique, fabriquer un dispositif interactif, ou peaufiner un prototype d'automatisation, choisir les bons composants et les intégrer en douceur est essentiel pour éviter les problèmes tels que le calage du moteur ou un contrôle irrégulier. Dans ce guide, tu seras simple, recommandations d'experts pour sélectionner les servomoteurs et joysticks parfaits, ainsi que des conseils pratiques pour le câblage, étalonnage, et optimisation des performances : tout ce dont vous avez besoin pour faire fonctionner votre système avec confiance et précision.. Passons directement à l'essentiel pour améliorer votre projet de construction ou d'ingénierie.!
Comprendre les servomoteurs: Fondamentaux et types
Lors du choix d'un servomoteur, il est crucial de comprendre les bases pour prendre des décisions éclairées. À leur base, les servomoteurs sont des actionneurs rotatifs ou linéaires équipés de mécanismes de rétroaction (généralement des encodeurs ou des potentiomètres) qui surveillent en permanence la position., vitesse, et couple. Ce feedback permet un contrôle précis, indispensable pour la robotique, automation, et les projets de loisirs.
Rotatif vs. Servomoteurs linéaires
- Les servos rotatifs sont les plus courants, arbres rotatifs à des angles spécifiques. Pensez aux bras robotiques, supports de caméra panoramiques et inclinables, ou modèles RC.
- Les servos linéaires déplacent les objets le long d'une trajectoire rectiligne. Ils sont idéaux pour les portes coulissantes, commandes de soupapes, ou positionnement linéaire précis.
Comprendre votre application permet de déterminer si le mouvement rotatif ou linéaire est le mieux adapté.
CA contre. Serviteurs DC: Couple et efficacité
- Les servomoteurs AC fournissent généralement un couple plus élevé à des vitesses plus rapides et de meilleures performances thermiques, ce qui les rend idéaux pour l’automatisation industrielle.
- Servomoteurs CC, couramment trouvé dans les applications de loisirs et légères, offrent une facilité de contrôle et des rapports couple/taille élevés, mais peuvent être moins efficaces dans les tâches lourdes.
Chaque type présente des compromis entre la vitesse, couple, efficacité, et complexité.
Hobby-Grade vs. Servos de qualité industrielle
- Les servos de qualité Hobby sont abordables et compacts, mais peuvent manquer de durabilité pour une utilisation intensive et soutenue..
- Servos de qualité industrielle, comme ceux de la gamme de servos domi, offrir une fiabilité accrue, options de commentaires avancées, et construction robuste adaptée aux environnements exigeants.
Que vous élaboriez un projet de robotique DIY ou que vous équipiez un système d'automatisation professionnel, La gamme domi couvre les servos industriels d'entrée de gamme jusqu'aux servos industriels haut de gamme., offrant un choix équilibré entre le coût, performance, et longévité.
Recommandations clés pour choisir le bon servomoteur
La sélection du bon servomoteur commence par un message clair, processus étape par étape qui correspond aux besoins spécifiques de votre application. D'abord, évaluer les principales exigences comme le poids de la charge, accélération requise, et l’environnement, que ce soit à l’intérieur, poussiéreux, ou humide. Ces facteurs façonnent considérablement votre choix de moteur.
Suivant, effectuer des calculs de couple et de vitesse, en tenant compte du taux d'inertie pour assurer un bon fonctionnement, mouvement réactif. Maintenir le rapport d'inertie dans les limites recommandées réduit les dépassements et améliore le contrôle. Considérez attentivement la taille du moteur et les options de montage, car une installation correcte affecte à la fois les performances et la longévité. Ne négligez pas les options de réducteurs, qui peut optimiser la sortie de couple sans sacrifier la vitesse.
Dispositifs de rétroaction tels que les encodeurs, résolveurs, ou les potentiomètres jouent un rôle essentiel dans la précision et la stabilité du contrôle. Le choix du bon type de feedback dépend de vos exigences de précision et de la complexité du système..
Évitez les pièges courants comme le sous-dimensionnement du servo ou la mauvaise lecture des spécifications.; des outils comme le calculateur de dimensionnement de domi peuvent aider à simplifier cela. Équilibrer votre budget par rapport aux performances est essentiel : la gamme de domi s'étend des choix d'entrée de gamme aux servomoteurs haut de gamme, vous permettant de choisir une solution adaptée à la fois à votre projet et à votre plan financier.
Pour des conseils techniques détaillés et choisir la meilleure correspondance, explorez le dédié de domi ressources techniques et gamme de produits pour trouver des solutions de servomoteurs sur mesure.
Démystifier les joysticks: Espèces, Spécifications, et critères de sélection
Choisir le bon joystick commence par comprendre les principaux types: analogique et numérique. Les joysticks analogiques offrent une fluidité, signaux continus, idéal pour un contrôle précis, tandis que les joysticks numériques offrent des instructions marche/arrêt simples, mieux adapté aux commandes simples. Cette différence de détection affecte la précision, alors choisissez en fonction de la précision dont vous avez besoin pour contrôler vos systèmes d'asservissement.
L'ergonomie compte aussi. Les manettes sont compactes et pratiques pour une utilisation occasionnelle ou pour les appareils portables, tandis que les joysticks à main complète offrent une meilleure adhérence et un meilleur confort pour un fonctionnement prolongé, courant dans les installations industrielles ou robotiques.
Le filaire ou le sans fil est une autre décision clé. Les joysticks filaires ont généralement une latence plus faible et aucun souci de batterie, ce qui les rend fiables pour les applications à temps critique. Les options sans fil ajoutent de la liberté mais peuvent introduire de légers retards et nécessiter une gestion de l'énergie, ce qui est crucial si vous appréciez un contrôle ou une portabilité ininterrompu..
Lors de la sélection d'un joystick, se concentrer sur la résolution (des comptes plus élevés signifient une détection de mouvement plus fine), retour de force (pour une expérience plus tactile), et durabilité, surtout si l'appareil sera soumis à une utilisation intensive. La compatibilité avec les microcontrôleurs comme Arduino est indispensable pour les amateurs et les développeurs; heureusement, de nombreux modules de joystick domi sont livrés avec une interface fluide et une technologie anti-dérive, ce qui aide à maintenir des positions neutres précises au fil du temps, empêcher les commandes d'asservissement erratiques.
Pour les options détaillées, explorez les modules de joystick de domi qui équilibrent précision et robustesse, parfait pour intégrer dans vos projets de contrôle de mouvement.
Interfacer des joysticks avec des systèmes servo
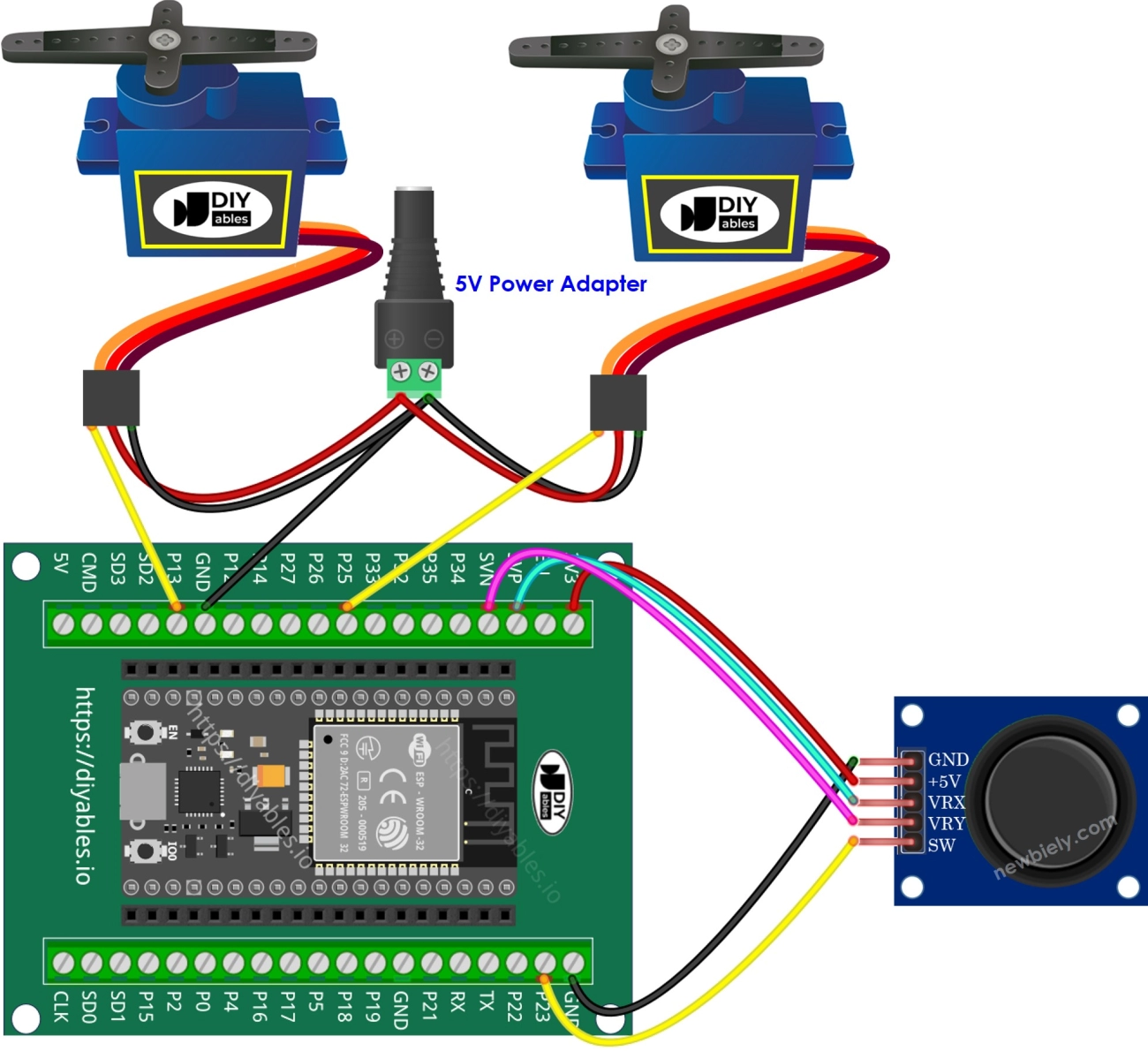
La connexion des joysticks aux servomoteurs nécessite une bonne maîtrise des éléments essentiels du matériel. Commencez par comprendre le brochage de votre joystick et de votre servo, en faisant correspondre le signal correct, pouvoir, et les broches de terre sont essentielles pour éviter les dommages. Vérifiez toujours la compatibilité de tension; la plupart des servos et joysticks de loisir fonctionnent sur 5V, mais vérifiez les spécifications pour éviter les incohérences.
Lors du câblage, garder les câbles courts et bien rangés pour réduire le bruit. Pour les configurations à servo unique, une simple connexion à trois fils (signal, pouvoir, sol) suffit, tandis que les systèmes à double servo ou panoramique nécessitent un câblage pour chaque servo ainsi que des lignes d'alimentation et de terre communes.. Des schémas de câblage clairs peuvent aider à garantir des connexions correctes et faciliter le dépannage.
En termes de contrôle de mouvement, les servomoteurs sont généralement pilotés par PWM (Modulation de largeur d'impulsion) signaux, où la largeur d'impulsion détermine l'angle de l'arbre du servo. Les joysticks produisent généralement une tension analogique proportionnelle à leur position; cela doit être correctement mappé à la plage PWM du servo. L'IDE Arduino rend cela simple, avec de nombreuses bibliothèques et exemples de code disponibles.
Les principales pratiques de code incluent:
- Étalonnage de la zone morte: filtrer les petites secousses du joystick autour du centre pour arrêter le scintillement du servo.
- Lissage de la gigue: faire la moyenne des valeurs d'entrée ou appliquer des filtres passe-bas pour créer des, mouvement stable.
Pour un contrôle plus avancé, les configurations multi-axes bénéficient de pilotes tels que les servomoteurs domi, qui gère plusieurs servos avec une synchronisation précise et des profils de mouvement fluides, idéal pour les bras robotiques ou les cardans de caméra.
Pour des exemples pratiques et des modules de sorties numériques pour compléter votre servocommande, envisagez d'intégrer des solutions comme le Module de sortie numérique Siemens Simatic S7-1200, qui offre des options d'interface matérielle robustes pour les projets de qualité industrielle.
Utilisation pratique et meilleures pratiques
Commencer par un projet débutant, une configuration simple où un seul joystick contrôle un servomoteur est idéale. Cela implique de câbler le joystick à un Arduino, connecter le fil de signal du servo à une broche PWM, et écrire un code simple pour mapper les mouvements du joystick à la position du servo. Un schéma clair permet de garantir un test initial fluide, spécialement pour ceux qui découvrent l'interface servo du joystick.
Pour un projet intermédiaire, essayez un support de caméra panoramique et inclinable à double servo contrôlé par un joystick. Cette configuration permet un contrôle indépendant des mouvements horizontaux et verticaux, améliorer la convivialité dans des applications telles que la surveillance à distance ou la photographie. Le câblage est un peu plus complexe, nécessitant une adaptation minutieuse des tensions et des affectations de broches. Cette étape perfectionne les compétences en matière d'étalonnage du contrôle de mouvement et introduit la coordination multi-axes de base..
Dans les déploiements professionnels, concentrez-vous sur un calibrage précis pour une réponse précise, gérer efficacement l’alimentation pour éviter les chutes de tension, et des tests approfondis pour garantir la fiabilité dans diverses conditions de fonctionnement. Des outils tels que le réglage PID ajusté au rapport d'inertie de votre servo peuvent améliorer considérablement les performances.. Des protocoles de maintenance cohérents et des mécanismes d'arrêt d'urgence améliorent également la sécurité et la longévité..
Les kits de servomoteurs de domi utilisés dans les contrôleurs de drones RC sont un excellent exemple de réussite pratique., connus pour leur grande précision de réponse et leur durabilité. Ces kits démontrent ce qui est réalisable en combinant des servos de qualité industrielle avec des modules de joystick robustes et une technologie anti-dérive., ce qui les rend parfaits pour les utilisateurs britanniques exigeants repoussant les limites des applications de loisirs et professionnelles.
Pour des composants de commande de moteur détaillés pour prendre en charge les configurations avancées, envisagez d'explorer des options comme le Circuit imprimé du système de contrôle CNC Fanuc qui peut fournir une interface et une fiabilité sophistiquées.
Dépannage et optimisation
Lorsque vous travaillez avec des servomoteurs et des joysticks, quelques problèmes courants peuvent survenir et affecter les performances et la fiabilité:
- Gigue: Cela résulte souvent d'un bruit de signal ou d'une modulation de largeur d'impulsion incorrecte. (MLI) paramètres. Vérifiez votre câblage pour détecter les connexions desserrées et assurez-vous d'un filtrage propre de l'alimentation électrique.. L'utilisation de câbles blindés peut réduire les interférences.
- Dénudage des engrenages: Une surcharge du servo au-delà de ses limites de couple peut endommager les engrenages.. Évitez cela en dimensionnant correctement votre servo à l'aide de calculs de rapport d'inertie et en optant pour des modèles à couple élevé si nécessaire..
- Bruit des signaux: Le bruit électrique peut déformer le retour de l'encodeur ou les entrées du joystick, provoquant des mouvements irréguliers. Une mise à la terre appropriée et l'ajout de billes de ferrite peuvent aider à nettoyer les lignes de signal.
Pour optimiser les performances, Concentrez-vous sur le réglage PID - ajustement proportionnel, intégral, et des gains dérivés pour fluidifier les mouvements et réduire les dépassements. Faire correspondre l'inertie du servo à la charge de l'application est essentiel pour un contrôle précis et éviter les contraintes mécaniques..
Un entretien régulier est la clé de la longévité:
- Lubrifier les engrenages et les pièces mobiles selon les recommandations du fabricant.
- Gardez le micrologiciel à jour pour bénéficier d'algorithmes de contrôle améliorés.
- Envisagez des mises à niveau de composants lorsque les conditions de fonctionnement dépassent les spécifications d'origine.
Enfin, toujours donner la priorité à la sécurité. Intégrez une protection contre les surintensités pour éviter les dommages en cas de décrochage et planifiez des arrêts d'urgence dans votre logique de contrôle pour atténuer les dangers..
Pour plus d’informations sur l’intégration de dispositifs de sécurité dans votre système d’asservissement, voir la gamme de capteurs de sécurité sans contact conçu pour améliorer la sécurité opérationnelle.