Jeśli przygotowujesz się do zapewnienia precyzyjnej kontroli ruchu w swoim następnym projekcie, wiedza o tym, jak wybrać i używać serwomotorów i joysticków, może mieć ogromne znaczenie. Niezależnie od tego, czy budujesz ramię robota, stworzenie interaktywnego urządzenia, lub dostrojenie prototypu automatyzacji, wybór właściwych komponentów i płynna ich integracja jest kluczem do uniknięcia problemów takich jak zgaśnięcie silnika lub błędne sterowanie. W tym przewodniku, dostaniesz prosto, zalecenia ekspertów dotyczące wyboru idealnych serwomotorów i joysticków, plus praktyczne wskazówki dotyczące okablowania, kalibrowanie, i optymalizacja wydajności — wszystko, czego potrzebujesz, aby Twój system działał pewnie i precyzyjnie. Przejdźmy od razu do najważniejszych elementów, które pomogą Ci ulepszyć Twój projekt DIY lub przedsięwzięcie inżynieryjne!
Zrozumienie serwomotorów: Podstawy i typy
Przy wyborze serwomotoru, Aby podejmować świadome decyzje, ważne jest zrozumienie podstaw. W ich rdzeniu, serwomotory to siłowniki obrotowe lub liniowe wyposażone w mechanizmy sprzężenia zwrotnego – zwykle enkodery lub potencjometry – które stale monitorują położenie, prędkość, i moment obrotowy. To sprzężenie zwrotne pozwala na precyzyjną kontrolę, niezbędne w robotyce, automatyzacja, jak i projekty hobbystyczne.
Obrotowy vs. Liniowe serwomotory
- Najpopularniejsze są serwa obrotowe, obracanie wałów pod określonym kątem. Pomyśl o ramionach robotycznych, obrotowe uchwyty kamery, lub modele RC.
- Serwa liniowe przesuwają obiekty po prostej drodze. Idealnie nadają się do drzwi przesuwnych, sterowanie zaworami, lub precyzyjne pozycjonowanie liniowe.
Zrozumienie aplikacji pomaga określić, czy najlepiej nadaje się ruch obrotowy czy liniowy.
AC vs. Słudzy DC: Moment obrotowy i wydajność
- Serwosilniki prądu przemiennego zwykle zapewniają wyższy moment obrotowy przy większych prędkościach i lepszą wydajność cieplną, dzięki czemu idealnie nadają się do automatyki przemysłowej.
- serwa prądu stałego, powszechnie spotykane w zastosowaniach hobbystycznych i lekkich, oferują łatwość sterowania i wysoki stosunek momentu obrotowego do rozmiaru, ale mogą być mniej wydajne w przypadku ciężkich zadań.
Każdy typ ma kompromisy między szybkością, moment obrotowy, efektywność, i złożoność.
Klasa hobbystyczna vs. Serwa klasy przemysłowej
- Serwonapędy klasy hobbystycznej są niedrogie i kompaktowe, ale może im brakować trwałości w przypadku długotrwałego, intensywnego użytkowania.
- Serwa klasy przemysłowej, takie jak te z linii serwo domi, oferują zwiększoną niezawodność, zaawansowane opcje informacji zwrotnej, i wytrzymała konstrukcja dostosowana do wymagających środowisk.
Niezależnie od tego, czy tworzysz projekt robotyki typu „zrób to sam”, czy wyposażasz profesjonalny system automatyki, Oferta domi obejmuje serwa przemysłowe od podstawowego do premium, zapewniając zrównoważony wybór pomiędzy kosztami, wydajność, i długowieczność.
Kluczowe zalecenia dotyczące wyboru odpowiedniego serwosilnika
Wybór odpowiedniego serwomotoru zaczyna się od jasnego, proces krok po kroku dostosowany do konkretnych potrzeb Twojej aplikacji. Pierwszy, ocenić podstawowe wymagania, takie jak ciężar ładunku, wymagane przyspieszenie, i środowisko — niezależnie od tego, czy znajduje się ono w pomieszczeniu, zakurzony, lub wilgotny. Czynniki te w znaczący sposób wpływają na wybór silnika.
Następny, wykonać obliczenia momentu obrotowego i prędkości, biorąc pod uwagę współczynnik bezwładności, aby zapewnić płynność, responsywny ruch. Utrzymywanie współczynnika bezwładności w zalecanych granicach zmniejsza przeregulowanie i poprawia kontrolę. Należy dokładnie rozważyć rozmiar silnika i opcje montażu, ponieważ prawidłowa instalacja wpływa zarówno na wydajność, jak i trwałość. Nie przeocz opcji przekładni, które mogą zoptymalizować wyjściowy moment obrotowy bez utraty prędkości.
Urządzenia sprzężenia zwrotnego, takie jak enkodery, rozwiązania, lub potencjometry odgrywają kluczową rolę w dokładności i stabilności sterowania. Wybór odpowiedniego rodzaju sprzężenia zwrotnego zależy od wymagań dotyczących precyzji i złożoności systemu.
Unikaj typowych pułapek, takich jak zbyt mały rozmiar serwa lub błędny odczyt specyfikacji; narzędzia takie jak kalkulator rozmiarów Domi mogą pomóc w uproszczeniu tego procesu. Niezbędne jest zrównoważenie budżetu z wydajnością — asortyment produktów domi obejmuje produkty od podstawowych produktów po serwomotory klasy premium, dzięki czemu możesz wybrać rozwiązanie, które pasuje zarówno do Twojego projektu, jak i planu finansowego.
Aby uzyskać szczegółowe porady techniczne i wybór najlepszego dopasowania, poznaj dedykowaną domi zasoby techniczne I asortyment produktów aby znaleźć dostosowane do indywidualnych potrzeb rozwiązania w zakresie silników serwo.
Demistyfikujące joysticki: Typy, Okular, i kryteria wyboru
Wybór odpowiedniego joysticka rozpoczyna się od zrozumienia głównych typów: analogowe i cyfrowe. Joysticki analogowe zapewniają płynność, sygnały ciągłe, idealny do precyzyjnej kontroli, podczas gdy cyfrowe joysticki oferują proste wskazówki dotyczące włączania i wyłączania, lepiej nadaje się do prostych poleceń. Ta różnica w odczuwaniu wpływa na precyzję, więc wybieraj w oparciu o to, jak dokładnie chcesz kontrolować swoje systemy serwo.
Ergonomia też ma znaczenie. Pałki kciukowe są kompaktowe i wygodne do codziennego użytku lub do urządzeń przenośnych, natomiast joysticki obsługujące całą rękę zapewniają lepszą przyczepność i komfort podczas dłuższej pracy, powszechne w konfiguracjach przemysłowych lub robotyki.
Kolejną kluczową decyzją jest wybór połączenia przewodowego czy bezprzewodowego. Przewodowe joysticki mają zazwyczaj mniejsze opóźnienia i nie powodują problemów z baterią, dzięki czemu są niezawodne w zastosowaniach, w których czas jest krytyczny. Opcje bezprzewodowe zwiększają swobodę, ale mogą powodować niewielkie opóźnienia i wymagać zarządzania energią – to istotne, jeśli cenisz sobie nieprzerwaną kontrolę i przenośność.
Przy wyborze joysticka, skup się na rozdzielczości (wyższa liczba oznacza dokładniejsze wykrywanie ruchu), wymuszona informacja zwrotna (dla bardziej dotykowych wrażeń), i trwałość, zwłaszcza jeśli urządzenie będzie intensywnie używane. Kompatybilność z mikrokontrolerami takimi jak Arduino jest koniecznością dla hobbystów i programistów; na szczęście, wiele modułów joysticków Domi jest wyposażonych w płynne interfejsy i technologię zapobiegającą znoszeniu, co pomaga w utrzymaniu dokładnych pozycji neutralnych w czasie, zapobieganie błędnym poleceniom serwomechanizmu.
Szczegółowe opcje, poznaj moduły joysticka Domi, które równoważą precyzję i solidność, idealny do integracji z projektami sterowania ruchem.
Łączenie joysticków z systemami serwo
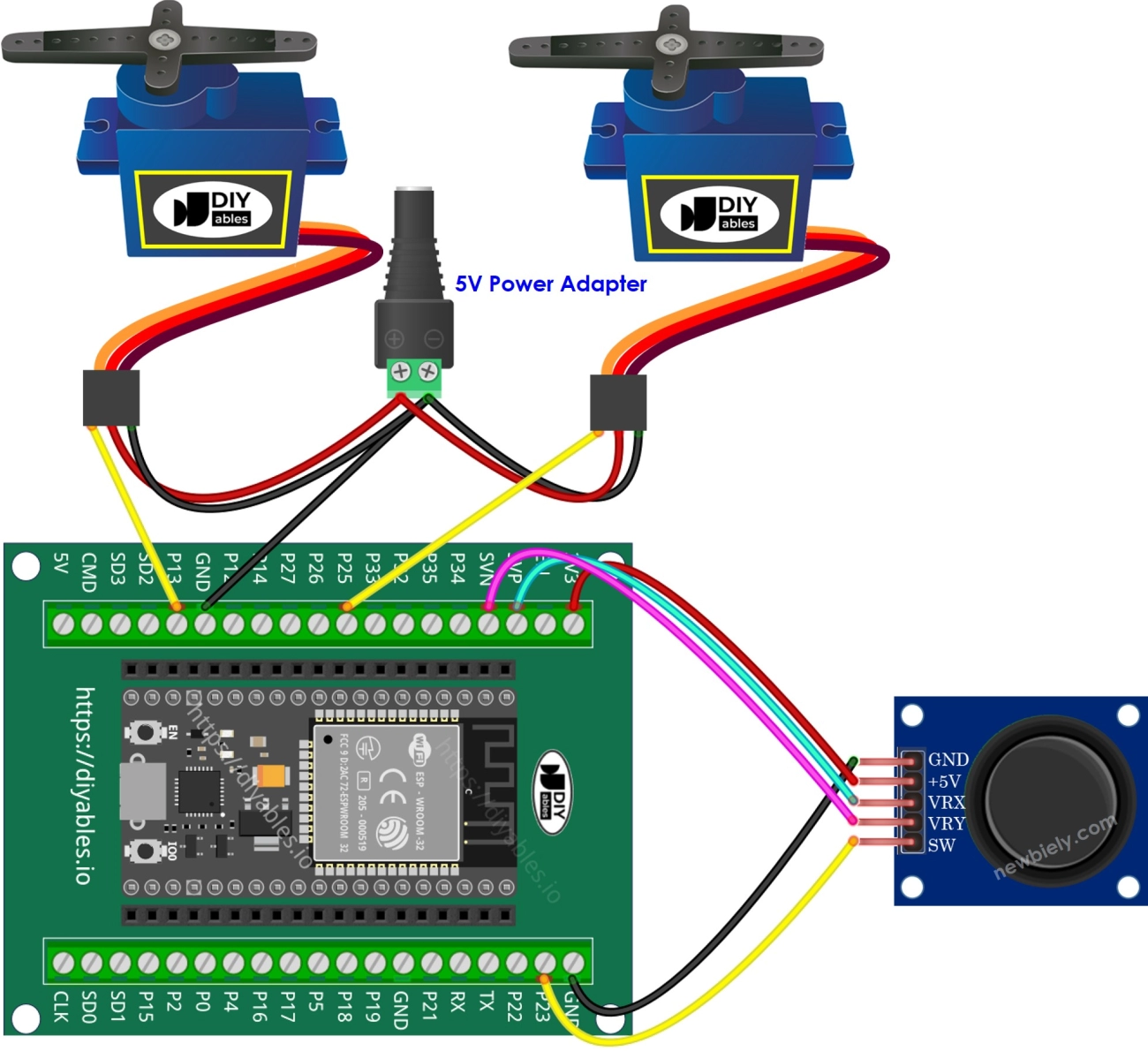
Podłączanie joysticków do serwomotorów wymaga dobrego zrozumienia podstawowych zagadnień sprzętowych. Zacznij od zrozumienia pinów joysticka i serwomechanizmu — dopasowując właściwy sygnał, moc, i kołki uziemiające są niezbędne, aby uniknąć uszkodzeń. Zawsze sprawdzaj zgodność napięcia; większość serwomechanizmów i joysticków hobbystycznych działa na napięciu 5 V, ale sprawdź dwukrotnie specyfikacje, aby zapobiec niedopasowaniu.
Podczas okablowania, utrzymuj kable krótkie i uporządkowane, aby zmniejszyć hałas. Do konfiguracji z pojedynczym serwem, proste połączenie trójprzewodowe (sygnał, moc, grunt) wystarczy, podczas gdy systemy z dwoma serwami lub systemami pan-tilt wymagają okablowania dla każdego serwa oraz wspólnych linii zasilania i uziemienia. Przejrzyste schematy okablowania mogą pomóc w zapewnieniu prawidłowych połączeń i ułatwieniu rozwiązywania problemów.
Jeśli chodzi o kontrolę ruchu, serwosilniki są zwykle napędzane przez PWM (Modulacja szerokości impulsu) sygnały, gdzie szerokość impulsu określa kąt wału serwa. Joysticki zwykle wyprowadzają napięcie analogowe proporcjonalne do ich położenia; należy to poprawnie zmapować do zakresu PWM serwa. Dzięki Arduino IDE jest to proste, z dużą ilością bibliotek i dostępnym przykładowym kodem.
Kluczowe praktyki związane z kodem obejmują:
- Kalibracja martwej strefy: odfiltrowanie drobnych drgań joysticka wokół środka, aby zatrzymać migotanie serwa.
- Wygładzanie drgań: uśrednianie wartości wejściowych lub stosowanie filtrów dolnoprzepustowych w celu uzyskania gładkości, stabilny ruch.
Dla bardziej zaawansowanej kontroli, konfiguracje wieloosiowe korzystają ze sterowników takich jak sterowniki serwo Domi, które obsługują wiele serwomechanizmów z precyzyjną synchronizacją i płynnymi profilami ruchu, idealny do ramion robotycznych lub gimbali do kamer.
Praktyczne przykłady i cyfrowe moduły wyjściowe uzupełniające sterowanie serwomechanizmem, rozważ integrację rozwiązań takich jak Moduł wyjść cyfrowych Siemens Simatic S7-1200, który oferuje solidne opcje interfejsu sprzętowego dla projektów klasy przemysłowej.
Praktyczne wykorzystanie i najlepsze praktyki
Zaczynając od projektu dla początkujących, Idealna jest prosta konfiguracja, w której pojedynczy joystick steruje jednym serwomotorem. Obejmuje to podłączenie joysticka do Arduino, podłączenie przewodu sygnału serwa do pinu PWM, i pisanie prostego kodu mapującego ruchy joysticka do pozycji serwa. Przejrzysty schemat pomaga zapewnić płynne wstępne testowanie, szczególnie dla tych, którzy dopiero rozpoczynają współpracę z serwomechanizmem joysticka.
Dla projektu pośredniego, wypróbuj uchwyt kamery z podwójnym serwomechanizmem obrotu i pochylenia, sterowany za pomocą joysticka. Taka konfiguracja umożliwia niezależną kontrolę ruchów poziomych i pionowych, poprawiając użyteczność w zastosowaniach takich jak zdalny nadzór lub fotografia. Okablowanie jest nieco bardziej skomplikowane, wymagające dokładnego dopasowania napięcia i przypisania pinów. Ten etap doskonali umiejętności kalibracji sterowania ruchem i wprowadza podstawową koordynację wieloosiową.
W profesjonalnych wdrożeniach, skoncentruj się na precyzyjnej kalibracji w celu uzyskania precyzyjnej reakcji, efektywnie zarządzać mocą, aby uniknąć spadków napięcia, i dokładne testy, aby zapewnić niezawodność w różnych warunkach pracy. Narzędzia takie jak strojenie PID dostosowane do współczynnika bezwładności serwa mogą znacznie zwiększyć wydajność. Spójne protokoły konserwacji i mechanizmy zatrzymania awaryjnego również zwiększają bezpieczeństwo i trwałość.
Świetnym przykładem praktycznego sukcesu są zestawy serwo firmy Domi stosowane w kontrolerach dronów RC, znane z wysokiej dokładności reakcji i trwałości. Zestawy te demonstrują, co można osiągnąć, łącząc wysokiej jakości serwomechanizmy klasy przemysłowej z solidnymi modułami joysticka i technologią zapobiegającą znoszeniu, co czyni je idealnymi dla wymagających użytkowników w Wielkiej Brytanii przekraczających granice zastosowań hobbystycznych i profesjonalnych.
Szczegółowe komponenty sterowania silnikiem umożliwiające obsługę zaawansowanych konfiguracji, rozważ skorzystanie z opcji takich jak Płytka drukowana układu sterowania CNC Fanuc które mogą zapewnić wyrafinowany interfejs i niezawodność.
Rozwiązywanie problemów i optymalizacja
Podczas pracy z serwomotorami i joystickami, może pojawić się kilka typowych problemów wpływających na wydajność i niezawodność:
- Drganie: Często wynika to z szumu sygnału lub nieprawidłowej modulacji szerokości impulsu (PWM) ustawienia. Sprawdź okablowanie pod kątem luźnych połączeń i zapewnij czyste filtrowanie zasilania. Używanie ekranowanych kabli może zmniejszyć zakłócenia.
- Rozbieranie przekładni: Przeciążenie serwomechanizmu powyżej jego dopuszczalnego momentu obrotowego może spowodować uszkodzenie przekładni. Unikaj tego, prawidłowo dobierając rozmiar serwa, korzystając z obliczeń współczynnika bezwładności i wybierając w razie potrzeby modele o wysokim momencie obrotowym.
- Szum sygnału: Szum elektryczny może zniekształcić sprzężenie zwrotne enkodera lub sygnały wejściowe joysticka, powodując nieregularne ruchy. Właściwe uziemienie i dodanie koralików ferrytowych może pomóc w oczyszczeniu linii sygnałowych.
Aby zoptymalizować wydajność, skoncentruj się na strojeniu PID – regulacji proporcjonalnej, całka, i zyski pochodne, aby zapewnić płynność ruchów i zmniejszyć przeregulowanie. Dopasowanie bezwładności serwa do obciążenia aplikacji ma kluczowe znaczenie dla precyzyjnej kontroli i uniknięcia naprężeń mechanicznych.
Regularna konserwacja jest kluczem do długowieczności:
- Nasmaruj przekładnie i części ruchome zgodnie z zaleceniami producenta.
- Aktualizuj oprogramowanie sprzętowe, aby móc korzystać z ulepszonych algorytmów sterowania.
- Rozważ modernizację komponentów, gdy warunki pracy przekraczają oryginalne specyfikacje.
Wreszcie, zawsze stawiaj bezpieczeństwo na pierwszym miejscu. Zintegruj zabezpieczenie nadprądowe, aby zapobiec uszkodzeniom podczas utyku i zaplanuj zatrzymania awaryjne w logice sterowania, aby złagodzić zagrożenia.
Więcej informacji na temat integracji urządzeń zabezpieczających w ramach systemu serwo, zobacz zakres bezkontaktowe czujniki bezpieczeństwa zaprojektowane w celu zwiększenia bezpieczeństwa operacyjnego.